
Industrial Networks - Part 2

- Data transference using Manchester codification, with rate of 31.25 kbit/s.
- For an integer communication signal each equipment must be powered with a minimum of 9 volts. The H1 physical medium enables powering the equipment via bus. The same pair of cables that powers de equipment also supplies the communication signal.
- Maximum length of 1900 m without repeaters.
- Using up to 4 repeaters, the maximum length may reach 10 Km.
- A Fieldbus equipment must be able to communicate with 2 up to 32 equipment in applications without intrinsic safety and without external power supply.
- A Fieldbus equipment must be able to communicate with 2 up to 4 equipment in applications with intrinsic safety and without external power supply.
- A Fieldbus equipment must be able to communicate with 1 up to 16 equipment in applications without intrinsic safety and without external power supply.
Obs.: More equipment than specified can be connected, depending on their consumption, the power source and the characteristics of the intrinsic safety barrier.
- No bus interruption when connecting and disconnecting the equipment while in operation.
- Bus, tree or star, or mixed.
A typical equipment transmission supplies 10 mA to 31.25 kbits/s in a load equivalent to 50 Ohms, creating a modulated peak to peak 1.0 Volt tension signal. The power source can supply from 9 to 32 VDC, though in safe applications (IS) it must meet the intrinsic safety barrier requirements.
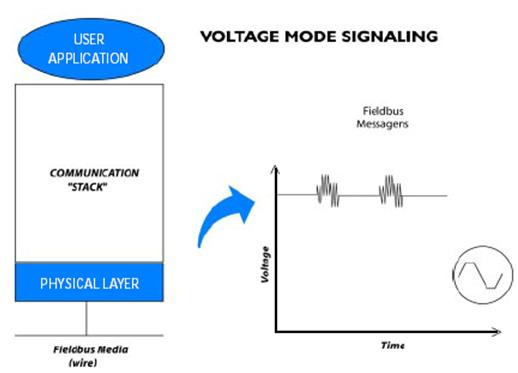
Figure 19 - 31.25 kbit/s Tension Mode
The total wiring length is the addition of the trunk size and all spurs with the type A cable, which is a maximum of 1900 m in non-safe areas. In safe areas, it is a maximum of 1000 m with type A cable, and the spurs must not exceed 30 m.
Following are some tips about wiring, shielding and grounding, as long as a digital network must be attentive to noise levels, undesirable capacitance and impedance that can degrade the signals.
The Data Link layer (Link Level) guarantees the integrity of the message and also controls the access to the transmission medium, while determining who can transmit and when it will occur. The link layer level guarantees that the data reach the right equipment. According to the Data Link layer, two types of equipment can be defined:
- Link Master: with the capability of turning into a LAS.
- Basic Device: without the capability of turning into a LAS.
There are three ways of accessing the network:
- Pass Token (bastão = shaft ? faz sentido?): the token is the direct way of starting a bus transaction. When ending the remittance of messages, the equipment returns the token to the LAS (Link Active Scheduler) that will transmit said token to the equipment that required it, via pre-configuration or scaling.
- Immediate Response: in this case, the master will give the opportunity for a station to respond with a message.
- Token Requisition: the equipment requires the token using one of its messages with the requiring codification, and the LAS, when receiving it, sends the token to it(?) if there is available time on the non-cyclical steps of the scaling.
The LAS controls and plans the bus communication through different commands. It controls the bus activitities by broadcasting different commands to all the equipments. As the LAS always executes the polling for equipments without tags in the Net, it is possible to connect devices at any time and integrate them automatically in a plug ´n play operation. In redundant systems, if the LAS fails, the Link Master equipment works as backup master during the failure.
It is also worth mentioning the Publisher/Subscriber model, whose equipment can produce and consume variables that are transmitted over the network through its immediate response access model. With a single transaction, the publisher can send his information to every equipment in the net that need the data. This is the most efficient model in the exchange of information, because there is total optimization between the participants in the transaction.
The communication services transmit scheduled calls and unscheduled calls. The jobs involving critical times, such as the control of process variables, are exclusively executed by the scheduled services, while the parameterization and diagnostic are unscheduled functions. The schedule is set by the system operator while configuring the FF system or automatically by the configuration tools, according to the control strategies. Periodically, the LAS broadcasts the synchronization signal on the bus so that every equipment has exactly the same data link time. In this type of scheduled transmission, the time point and the sequences are clearly defined, and characterizes the so-called deterministic system. Based on the Schedule, a transmission list is generated and defines when a given equipment is ready to send its data.
Each device receives a separate schedule that permits the System Management to know exactly which and when a task must be executed and when the data must be received or sent.
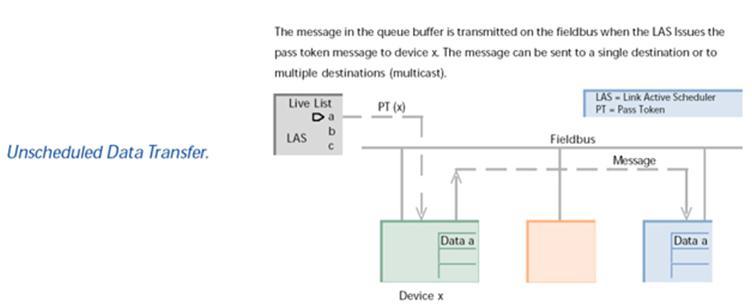
Figure 20 - Data Transfer
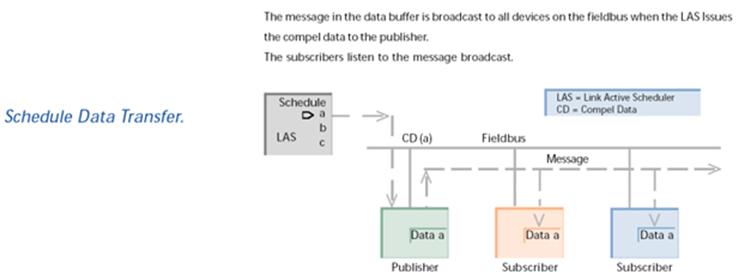
Figure 21 - Scheduled Data Transfer
The Application Layer supplies an interface for the software of the equipment application and will define the way to read it, write or issue a task in a remote station and also how to transmit the message. The supervision will define how to initialize the network through the Tag, to attribute addresses, time synchronization, transaction scaling or the connection of input and output of function block parameters. The FAS and FMS are the interface between the data link layer and the user application. The FAS creates the VCRs (Virtual Communication Relationships) used on the FMS upper layer when executing taskds. The VCRs describe different types of communication processes and enables activities meant to be processed more rapidly. The Foundation Fieldbus uses three types of VCRs:
- VCR Publisher/Subscriber: transmits functional blocks input and output data;
- VCR Client/Server: used in unscheduled communication, it is the base for initialization through the operator;
- Report Distribution communication: controls the network operation by checking failures and adding or removing equipment.
The FMS provides standard communication services. Each type of data are attributed and executes object descriptions containing the complete definitions of all kinds of standard messages that will be accessed through the object dictionary. In addition, the FMS defines the VDFs (Virtual Field Devices) which are used to make the object descriptions available to the entire network. The VDFs and the object descriptions are used to guarantee total access to the local information from the equipment anywhere in the network using associated communication services.
The User Application is really where the functionality of the equipment or the tools find room. In this level, transmitters, positioners, actuators, converters, hosts, etc, make the interface with the user. Fundamental Foundation Fieldbus points are interoperability and interchangeability between manufacturers and their devices, which are met with open specifications and defined in a uniform way. It is at user level that will be defined the data format and the semantics that enabled the equipment to understand and perform smartly when handling the information. The Foundation Fieldbus is based on the functional block concept (DI, AI blocks), PID control, math calculation (arithmetic block), work calculation (DO, AO blocks), etc. The scheduled transmissions are based on the functional blocks.
Each block has a task associated to its inputs/outputs. Some function blocks with defined standards, like AI, AO, CS, DI, DO, PID, etc. The number of blocks for equipment depends on the manufacturer. The resource block describes the field equipment features, such as, name of the equipment, manufacturer, serial number, hardware and software versions. The transducer block expands the complexity and possibilities for an equipment application. Its data enables the functional block input/output parameters and they can be used on calibration, measurement, positioning, linearization, etc.
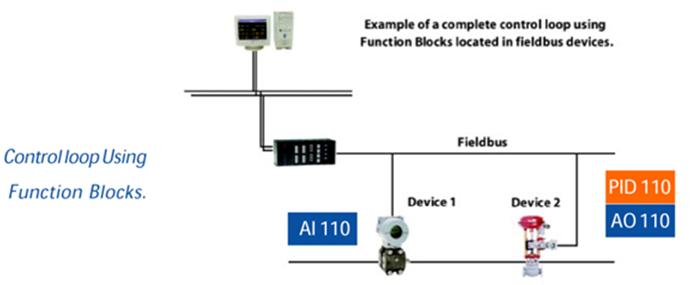
Figure 22 – Example of control through function blocks
New components are added to the block model:
- Link Objects: define the links between the different function blocks, either internal or external.
- Alert Objects: allow the report of alarms and events on the fieldbus network.
- Trend Objects: allow the trend of the information from the function blocks and the high level analysis.
- View Objects: they are groups of function block parameters that can quickly perform monitoring, configuration, maintenance and control tasks. They are divided in dynamic and static tasks, according to the data.
The group of View and Trend parameters accelerate the access to the information.
During commissioning, startup and maintenance, as well as when executing diagnostic functions, an open communication system must guarantee that the control system can access all the information from every field equipment, besides keep their total control. The Device Description (DD), has all the information that make those requirements possible and understand the information from the equipment to show it properly to the user. It is written with DDL language (Device Description Language), very similar of the C language to generate a file text that, when converted by the Tokenizer (Tool that generates DDs), can be distributed to all the equipment.
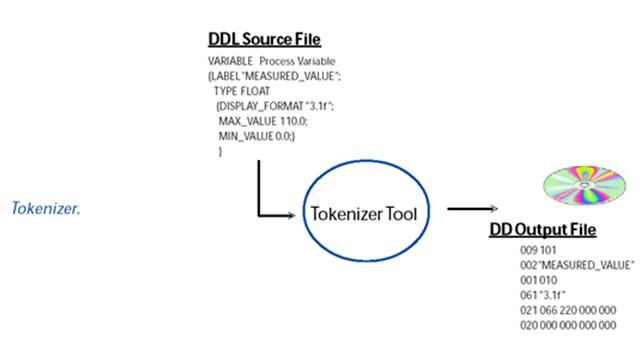
Figure 23 – Generating the DD
The DDs are used in conjunction with the capability files written in the Common File Format (CFF), where the equipment resources are defined and are available. This guarantees that when offline, the host do not use resources not available in the equipment.
- Synchronization of the data activities relevant in time, according to the transmission schedule.
- Cyclical processing of the transmission list (only the LAS) with the pre-defined Schedule.
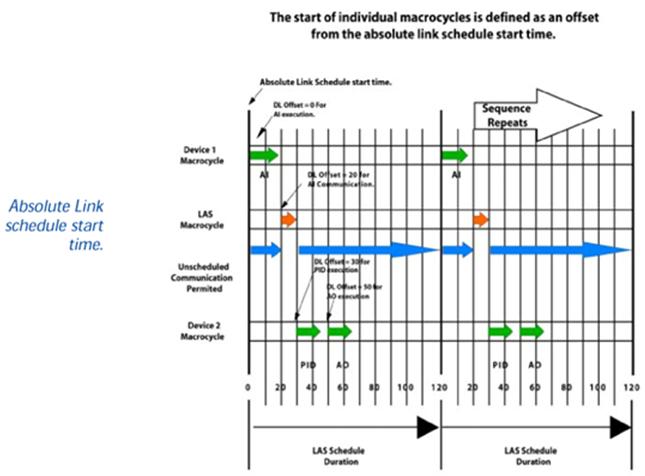
Figure 24 – Function block cyclical processing
Additional tasks are attributed to the System Management:
- Automatic attribution of a Link Master to the LAS if a failure occurs to the current LAS.
- Synchronization of the application clock.
- Automatic addressing of newly connected stations.
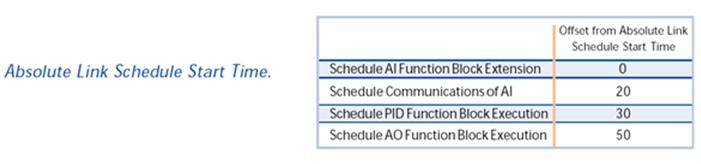
Figure 25 - Scheduled and non-scheduled transmission. Each equipament gets a separate Schedule, enabling the System Management to know exactly which and when the task must be executed and when the data should be sent or received.
The communication schedule as well as the equipment parameterization must be performed before the start-up. Basically, there are two steps: project step and configuration step.
The DDs of the network equipment must be available for the configuration tool to connect the information according to the control strategies through the inputs and outputs. This task is easily executed with the graphic interfaces of the advanced configuration tools, for example, the SMAR Syscon.
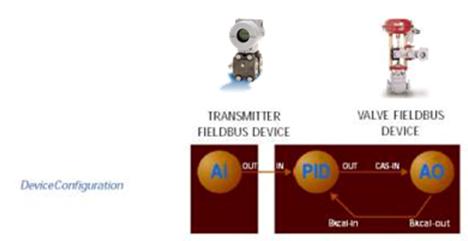
Figure 26 – Function block connection for a ladder control
Figure 26 shows a ladder control whose pressure value, emitted by a pressure transmitter, is connected to the PID function block. This block can be implemented, for example, on a valve positioner, which, through the AO block, acts on the final element. In addition to function blocks, the configuration tool also configures the individual execution rates of the individual loops. Finally, the LAS and all of the Llink Masters receive the Schedule transmission list. The system configuration rate is complete and the LAS System Management and equipment can control the entire system.
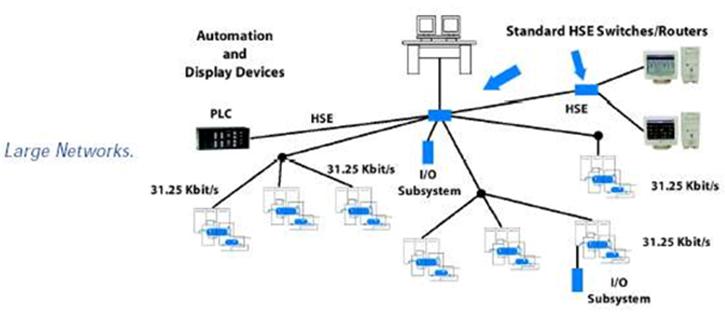
Figure 27 – Fieldbus Network configuration
Foundation Fieldbus also has the HSE, High Speed Ethernet, whose Link Device (e.g. the SMAR DFI302) is used to connect field equipment 31.25 kbit/s distant to a standard FF network at 100 Mbit/s. It is applicable to high speed networks with interfaces for I/O systems 31.25 kbit/s away or on the HSE.
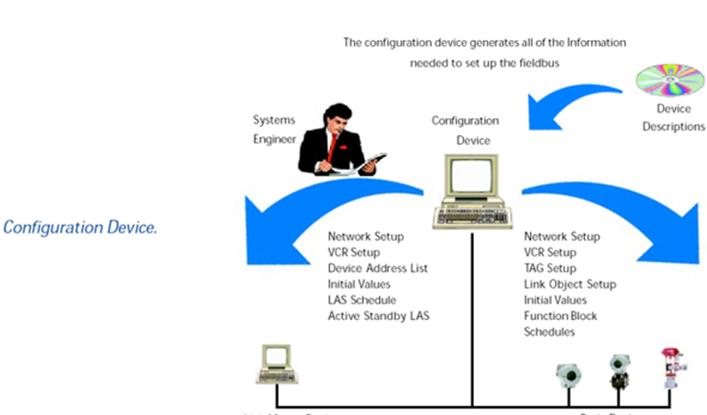
Figura 28 – HSE used in dense networks involving I/O subsystems.
AS-interface
Any, a consortium of successful companies elaborated a bus system for sensor and actuator networks, named Actuator Sensor Interface (AS-Interface or AS-i). This system was developed to meet some defined requirements stemming from the experience of its founders in supplying the bit-oriented market. Thus, the AS-I network was created as a complement to the other systems and simplify and expedite the connection between sensors and actuators with their respective controllers.
An industrial system formed by AS-i networks is regarded as one of the most economical and the ideal for communication between actuators and sensors. The benefits of using an AS-i network range from hardware savings until the commissioning of an AS-i network.
Let´s see some AS-I network benefits:
Simplicity
The AS-i network is very simple and requires a single cable to connect input and output modules of any maker. Users do not need to have deep knowledge about industrial systems or communication protocols. Unlike other digital networks, the AS-I network does not require terminators and equipment description files. Simplicity is its strong point.
Performance
As-i systems are efficient, extremely fast and perfectly suitable to substitute large and expensive systems. There are AS-i masters specially developed to communicate with legacy control systems and integrate smoothly the existing technologies. But the best thing is that all of it runs in a simple and reliable way.
Flexibility
It is easily expansible – just connect it to a module, address it, and connect the network cable. Check if the power supply LED is connected and it is ready for the connection to the next module. The AS-I network supports any wiring topology: star, bus, tree, ring or other configuration up to 100 m of cable. Or, by adding repeaters it is possible to reach up to 300 meters. The AS-I network is easy to install, as it does not need terminators at the ends.
Cost
AS-i networks reduce wiring and installation costs at about 50%, if compared to conventional competitors. The use of a single cable to connect with discrete equipment reduces the number of cabinets, conduits and trays. The savings with network use can really be significant, since by using less cables there are less costs with installation, commissioning and engineering time, for its simplicity.
The name Actuator Sensor Interface stands for its own concept. Although technically, the “AS-I” is a bus, the term “interface” shows that it serves as a simple link to access sensors and actuators on the field
The AS-i industrial networks were designed to be applied in automated environments, to replace the traditional connection of switching (on/off) actuators and sensors for a single bus. In addition to these, it can be connected to sensor/actuator buses that execute digital/analogical conversion, or vice-versa. Traditionally, these connections are formed by twisted pair of wires that connect one to another, or the actuators and sensors to the corresponding controller, commonly a Programmable Logic Controller.
The AS-i system is configured and controlled by a master, which programs the interface between a controller and the AS-i system. This master exchanges information continuously with all the sensors and actuators connected to the AS-i bus in a pre-determined and cyclic way.
Figura 29 illustrates the system as a whole, enhancing its main components: cable, ASi power source with its circuit for decoupling, the AS-i master and slave.
- Interface 1: between the slave and the sensors and actuators;
- Interface 2: between equipment (power source, master and slave) and the transmission medium;
- Interface 3: between the master and the host, namely, any entity that accesses a superior level AS-i.
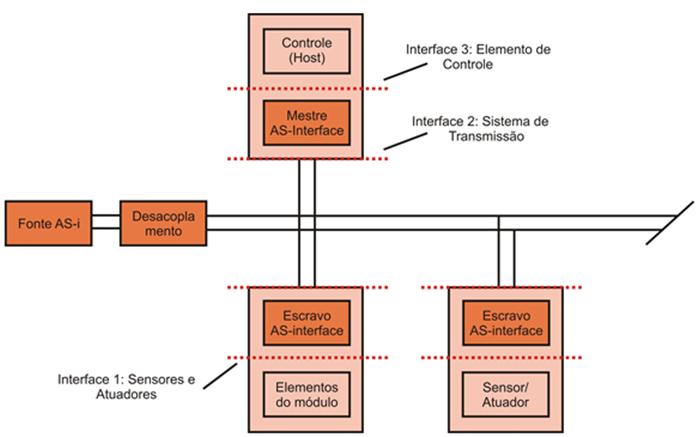
Figure 29 – Components and interfaces.
The AS-Interface network connects the most simple devices in automation solutions. A single cable links actuators and sensors with the upper control levels. AS-Interface is a open, standard network system (EN50295) that interconnects actuators and sensors in a very simple way.
The connection of elements can be done in tree, star, line structure, or in any combination of them. As there are no conventional connections and with reduced number of terminal blocks and connectors to interconnect, it not only cuts down costs and mounting time, as well as reduces errors.
The connection technology of parallel cables connects each individual equipment contact separately to the terminals and terminal blocks of sensor and actuators. The AS-i network substitutes the traditional multiple cable set, passage boxes, conduits and cable pipes for a simple cable especially devised for the AS-i network.
The AS-i is characterized by the fact that the 24Vcc power source of sensors and actuators and the information about the their status are transmitted together on the same pair of cables. The maximu network configuration is of 62 slave participants that are accessed cyclically by a master at the upper control level. The reaction time is short: for all slaves connected, the response time is 10 ms.
Formerly, sensors and actuators needed to be connected to the controller via terminals, connectors and terminal blocks. AS-i reduces installation and maintenance costs, by enabling the exchange of information through a standard 2-wire cable at the same time as powering the equipment. Slaves are connected directly on the bus without the need for additional inter-connection.
This 2-way flexible cable is considered as the Standard for AS-i networks. There is also another cable with a circular shape that must be used only under the manufacturer´s specification. A high-tension cable, it is described as HO5VV-F 2X1.5 and complies with the CENELEC or DIN VDE 0281 standards, being inexpensive and easy to find.
Blue
Brown
Sheathing
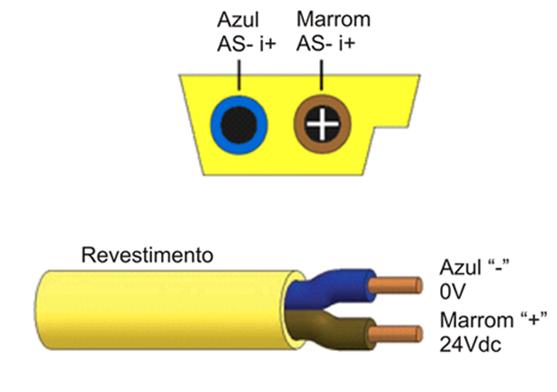
Figure 30 – Standard AS-i bus cables
DeviceNet
DeviceNet is a digital, multi-drop network for connection between sensors, actuators of industrial automation systems. It was developed for maximum flexibility between field equipment and maximum interoperability between different vendors.
Originally introduced by Allen-Bradley in 1994, the DeviceNet transferred its technology for ODVA in 1995. The ODVA (Open DeviceNet Vendor Association) is a non-profit organization composed by hundreds of company the world over, which maintain, publicizes and promotes the DeviceNet and other networks based on the CIP protocol (Common Industrial Protocol). To date, it assembles more than 300 member companies, more than 800 of which offer DeviceNet products
The DeviceNet network is classified as a devicebus network, whose main characteristics are: high speed, byte-level communication including communication with discrete and analog equipment, and powerful diagnostic of the network devices.
- cyclic data of sensors and actuators directly related to control and,
- non-cyclic data indirectly related to control, like configuration and diagnostic.
The cyclic data represent information exchanged periodically between the field equipment and the controller. On the other hand, the non-cyclic data are information exchanged eventually during configuration or diagnostic of the field equipment.
The physical layer that accesses the DeviceNet network is based on the CAN technology (Controller Area Network) and the upper layers of the CIP protocol define an architecture based on objects and connections between them.
A DeviceNet network can hold until 64 devices, each one of them for one network knot, addressed from 0 to 63. Any of these can be used, without restriction, although the 63 should be avoided, as this is used on
commissioning tasks.
An example of a DeviceNet network is shown on figure 31.
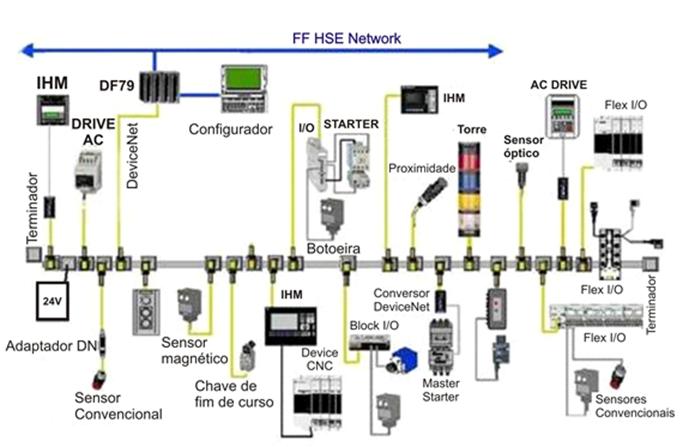
Figure 31 – Example of DeviceNet network
Reliable Solutions

